AUTKRYPTO
Kryptosystem Made-in-Austria
https://projekte.ffg.at/projekt/5125239
INDALOS
Fertigstellung der Software INDALOS (INterference Detection And LOcalisation System) zur annähernden Marktreife
https://projekte.ffg.at/projekt/5124424
SpecOps
Innovative spektroskopische Methoden zum kontaktlosen Nachweis von C und B Substanzen auf Oberflächen und Personen
https://projekte.ffg.at/projekt/5125261
HMR-SanTrain
Haptic Mixed-Reality Sanitäter Training
https://projekte.ffg.at/projekt/5124356
HyDroMon
KI-basierte, kooperative multimodale und multisensorale Monitoring-lösungen durch Drohnen mit Wasserstoffantrieb
https://projekte.ffg.at/projekt/5125209
Sicherheitsforschungsprogramm KIRAS
-
theoderich
- Beiträge: 29935
- Registriert: So 29. Apr 2018, 18:13
-
theoderich
- Beiträge: 29935
- Registriert: So 29. Apr 2018, 18:13
Re: Sicherheitsforschungsprogramm KIRAS
XR-SAT
eXtended-Reality Situation Awareness Training for improved mission readiness
https://projekte.ffg.at/projekt/5137331
eXtended-Reality Situation Awareness Training for improved mission readiness
https://projekte.ffg.at/projekt/5137331
-
theoderich
- Beiträge: 29935
- Registriert: So 29. Apr 2018, 18:13
-
theoderich
- Beiträge: 29935
- Registriert: So 29. Apr 2018, 18:13
Re: Sicherheitsforschungsprogramm KIRAS
https://de.linkedin.com/posts/ralph-jan ... 49632-dcDoAm 21. Oktober 2025 führte das #AIES in Zusammenarbeit mit dem Bundesministerium für Landesverteidigung und dem AIT Austrian Institute of Technology die Abschlussveranstaltung des Forschungsprojekts „USKIT“ (Unbemannter Schutz Kritischer Infrastruktur) durch. Das Projekt zielt darauf ab, neue unbemannte Systeme zur Überwachung und Absicherung kritischer Anlagen zu entwickeln.
- USKIT - Unbemannter Schutz Kritischer Infrastruktur
Einsatz von selbstorganisierten Drohnenschwärme zur Luftraumüberwachung sowie Untersuchung von Interventionsmaßnahmen zur Abwehr
https://www.kiras.at/gefoerderte-projek ... astruktur/
-
theoderich
- Beiträge: 29935
- Registriert: So 29. Apr 2018, 18:13
Re: Sicherheitsforschungsprogramm KIRAS
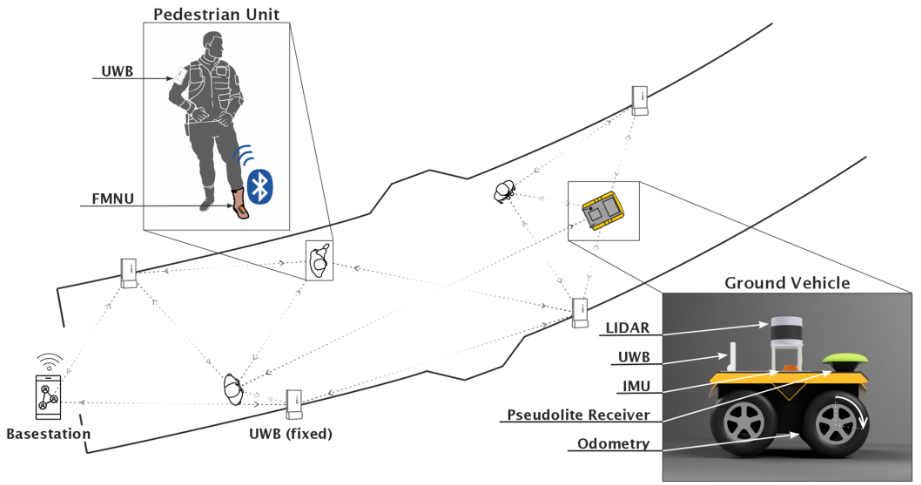
Verwendung von maschinellem Lernen bei Fußgängernavigation mittels inertialer Messeinheitentheoderich hat geschrieben: ↑Do 29. Feb 2024, 22:13 NIKE MATE – NIKE huMan mAchine navigation TEaming
https://www.kiras.at/gefoerderte-projek ... n-teaming/Ziel des Projekts ist die Konzeptionierung und Erprobung eines kooperativen Lokalisierungssystems für Einsatzkräfte und technische Assistenzsysteme in einem urbanen Raum. Insbesondere liegt der Fokus auf unterirdischen Anlagen, wobei auch der einsatzmäßige Übergang zwischen Indoor und Outdoor berücksichtigt wird. Zur Stützung der Einsatzführung sollen die berechneten Positionen der einzelnen Akteure (Mensch und Maschine) im Subsurface Operations Mission Tool (SOMT) visualisiert werden. Auf Basis der Positionen kann Kollisionsgefahr zwischen Menschen und Maschinen frühzeitig erkannt und Kollisionen somit vermieden werden.
https://ovn-austria.at/fileadmin/AHORN/ ... ll_TUG.pdf
-
theoderich
- Beiträge: 29935
- Registriert: So 29. Apr 2018, 18:13
Re: Sicherheitsforschungsprogramm KIRAS
TU Graz entwickelt Navigationssystem für Rettungskräfte im Untertageeinsatz


https://www.tugraz.at/news/artikel/navi ... unter-tage
https://www.tugraz.at/news/artikel/navi ... unter-tage
https://www.ohb-austria.at/company/projects/nike-mate/NIKE MATE addresses the challenges faced by emergency services in complex and dynamic environments. NIKE MATE takes a holistic approach, emphasizing collaboration between heterogeneous units such as humans, robots, UGVs and UAVs to operate simultaneously in a condensed space.
Aims
The project aims to design and test a cooperative localization system for emergency services and technical assistance systems in an urban area. In particular, the focus is on underground facilities, whereby the operational transition between indoor and outdoor is also taken into account. In order to support the mission control the calculated positions of the individual actors (man and machine) shall be visualized in the Subsurface Operations Mission Tool (SOMT). SOMT was also used in the predecessor project NIKE-BLUETRACK to visualize positions. Based on the positions, the risk of collision between people and machines can be recognized at an early stage and collisions avoided.
Brief Description
Although the BMLV has the means to determine the position of its forces, these are primarily used for display in command information systems, they are not connected in the required manner and they do not work in a GNSS-denied environment. In particular, the passage between outdoor and indoor is a critical point in the integrated positioning system, as the available sensors change at this point and also have reduced accuracy and reliability in the peripheral areas. To counteract this problem, a GNSS pseudolite system is developed at the crossover point. The robot will be equipped with the corresponding pseudolite receivers in order to improve the positioning and also to embed the local coordinate system for indoor positioning in the global outdoor coordinate system.
-
theoderich
- Beiträge: 29935
- Registriert: So 29. Apr 2018, 18:13
Re: Sicherheitsforschungsprogramm KIRAS
DEKI Safe Ausbau
DEKI Safe Ausbau - Fortschrittliche Loitering-Erkennung für Fernüberwachung
https://projekte.ffg.at/projekt/5150257
DEKI Safe Ausbau - Fortschrittliche Loitering-Erkennung für Fernüberwachung
https://projekte.ffg.at/projekt/5150257
